Фотограмметрия и стереовидение
Среди них - школы в области цифровой обработки изображений Самарского государственного аэрокосмического университета под руководством В.А. Сойфера и В.В. Сергеева и Ульяновского технического университета под руководством К.К. Васильева. Авторы выражают им свою признательность за то сотрудничество, к числу результатов которого относится и данное учебное пособие.
В обычном изображении трехмерного пространства информация о расстоянии до различных элементов сцены проявляется только в виде косвенных признаков: через относительные размеры объектов, затенение одних объектов другими, различной освещенностью и т.д. Один из способов получения информации о глубине состоит в регистрации нескольких изображений сцены под различными ракурсами. В этом случае точки сцены дают изображения, относительное положение которых зависит от расстояния до точки наблюдения. Оказывается, сопоставляя эти изображения, в ряде случаев можно реконструировать трехмерную структуру сцены. Основы теории определения положения объектов в пространстве по их перспективным изображениям были положены еще в средние века, а в XVIII веке перспективные рисунки стали использоваться в топографических целях. Появление фотографии положило начало фотограмметрии – науке об определении формы, размеров и пространственного положения различных объектов посредством измерения их фотографических изображений. В начале XX века был изобретен стереокомпаратор – прибор для измерения пространственного положения объектов по паре перекрывающихся фотографических изображений. Интерес к методам восстановления трехмерной структуры сцен по их плоским изображениям возобновился в середине XX столетия в связи с исследованиями в области искусственного интеллекта, а практическая потребность в робототехнических устройствах, способных ориентироваться в трехмерном пространстве, постоянно поддерживает этот интерес в последние десятилетия.
В этой главе мы рассмотрим процесс формирования изображений, соотношения между координатами точек сцены и их изображениями и методы оценивания параметров системы регистрации и трехмерной структуры сцены.
6.1. Модель регистрирующей камеры
Строго говоря, различные точки пространства предметов отображаются оптической системой камеры в пространстве изображений на различных расстояниях от фокальной плоскости. Однако, если расстояние между камерой и наблюдаемой сценой значительно превышает фокусное расстояние оптической системы, можно считать, что изображение строится в ее фокальной плоскости. В этом случае можно воспользоваться проективной моделью камеры, в которой изображение трехмерного объекта получается проектированием его в фокальную плоскость (плоскость изображения) через единственную точку, называемую оптическим центром. Прямая линия, перпендикулярная плоскости изображения и проходящая через эту точку, называется оптической осью камеры, а точка пересечения оптической оси с плоскостью изображения – главной точкой.
Определим в трехмерном пространстве ортогональную правую систему координат OXYZ, начало которой совпадает с оптическим центром, ось OZ - с оптической осью камеры. Такая система называется стандартной системой координат камеры. Пусть плоскость изображения находится на расстоянии







Рис.6.1. Система координат проективной камеры
Для полного описания камеры следует учесть, что для регистрации изображения в плоскости изображения камеры помещается какой-либо фотоприемник. В фотокамере это фотопластинка или фотопленка, в видеокамеру это видикон или фотоприемная полупроводниковая матрица, в некоторых специальных камерах – электромеханический сканер. В общем случае измерение координат в фотоприемнике осуществляется в единицах, отличных от единиц, задающих координаты в стандартной системе.
Например, если используется матричный фотоприемник, его естественными координатами являются номер строки и номер столбца фотоприемной ячейки. Поэтому для полного описания камеры необходимо выразить координаты точки


где



В новой системе координаты проекции точки


Для последующего изложения введем трехмерный вектор




где

6.2. Связь между различными системами координат
В общем случае трехмерные координаты точки могут быть заданы в системе, не совпадающей со стандартной системой координат камеры (назовем ее глобальной). Пусть OXYZ – глобальная система координат, а



где





Рис.6.2. Переход от глобальной системы координат к стандартной системе координат камеры.
На рис. 6.2. схематически показано преобразование координат. Здесь










Особенность матрицы









Уравнения (6.4) являются условиями взаимной ортогональности векторов





Верхний знак соответствует случаю, когда матрица
Смысл вектора

6.3. Стереоскопическая система
Рассмотрим ситуацию, когда две камеры, находящиеся в разных точках, регистрируют одну и ту же сцену. Пара изображений, получаемых при этом, называется стереопарой. Обратимся сначала к простейшему случаю. Пусть одинаковые камеры расположены так, что их оптические оси параллельны, а прямая, проходящая через оптические центры, перпендикулярна оптическим осям (эта прямая называется базовой линией, а ее отрезок, заключенный между оптическими центрами – базой). Положим длину базы равной

Выберем такую глобальную систему координат, начало которой



Выберем точку





Заметим, что в направлении, перпендикулярном направлению базовой линии, координаты сопряженных точек (


Рис.6.3. Простейшая стереоскопическая система
Это означает, что, зная геометрию съемки и выполнив измерения координат проекций одной и той же точки в плоскостях изображения камер, можно вычислить глубину (координату



Разность

Теперь рассмотрим общий случай, когда оптические оси камер не параллельны, и направление смещения оптического центра одной камеры относительно оптического центра другой произвольно (рис.6.4). Введем для каждой камеры свою стандартную систему координат, так как это было сделано в разделе 6.1. Пусть первой камере соответствует система координат








где


Рис.6.4. Система двух произвольно ориентированных камер
Используя (6.2) из (6.8) можно получить соотношение, связывающее координаты сопряженных точек (в координатах фотоприемника) :

где



(Предполагается, что регистрация может выполняться двумя различными камерами, внутренние параметры которых определяются матрицами


Уравнения (6.8) и (6.2) позволяют оценить трехмерные координаты точки



где

Учитывая это, для оценивания неизвестных





разрешая которую относительно

Теперь, используя (6.2), можно вычислить вектор трехмерных координат точки


Из всего изложенного выше следует, что для оценивания трехмерных координат некоторой точки по стереопаре необходимо: а) знать внутренние параметры камер (задача калибровки), б) знать параметры взаимного расположения камер (задача взаимного ориентирования), в) найти и определить на изображениях координаты соответствующих данной точке сопряженных точек (задача поиска сопряженных точек).
6.4. Калибровка камеры
Заметим сразу, что поскольку фокусное расстояние





Пусть камера регистрирует сцену, содержащую




Если положение камеры относительно этой системы известно (т.е. известны матрица




Для




где






Очевидно, достаточно двух опорных точек, чтобы получить оценки внутренних параметров камеры:




Обратим внимание на необходимость выполнения условий


Для увеличения точности оценок внутренних параметров следует использовать большее количество опорных точек. Системы (6.13) в этом случае становятся переопределенными, и для их решения можно применить МНК. Минимизируя норму вектора невязки



Рассмотрим теперь задачу калибровки в более общей постановке. Пусть неизвестны не только матрица


Матрица








Отметим два важных свойства этой матрицы, которые легко получить из (6.15), учитывая (6.4) и (6.5):


Оказывается, что если элементы калибровочной матрицы





Кроме того, непосредственно из (6.14) следует, что






Задача калибровки, следовательно, сводится к предварительному оцениванию элементов матрицы
Рассмотрим сначала линейный метод оценивания матрицы



или, подставляя в два первых уравнения значение


Зная координаты


Представим эту систему в матрично-векторном виде:

где



Сначала рассмотрим некоторые общие особенности этой системы. Очевидно, что одним из решений этой системы является тривиальное




Первый – когда ранг матрицы





Знак


Второй случай реализуется, если ранг

Рис.6.5. Калибровочный объект
Рассмотрим теперь непосредственно метод решения системы (6.20). Обычно, чтобы уменьшить влияние ошибок измерений трехмерных координат опорных точек и координат их изображений в камере, используют больше, чем шесть опорных точек. Тогда система (6.20) становится переопределенной. Кроме того, как и в разделе 6.2, из-за ошибок в измерениях координат реально система (6.20) принимает вид

где
В этой ситуации можно снова воспользоваться МНК, согласно которому в качестве оценки вектора









Другой подход к оцениванию матрицы

которая представляет сумму квадратов этих расстояний, и минимизируем ее по
Решить эту задачу можно посредством методов условной минимизации [6.5, гл.VI], изложение которых выходит за рамки данного учебника. Следует отметить только, что такой подход обычно дает результаты оценивания, более устойчивые к ошибкам измерений, чем рассмотренный выше линейный.
6.5. Взаимное ориентирование
В предыдущем параграфе показано, как с помощью тестовой сцены не только оценить внутренние параметры камеры, но и определить ее положение относительно системы координат, в которой задана тестовая сцена. Последнее позволяет нам, откалибровав две камеры по одной тестовой сцене, определить их взаимное положение (см. (6.8)). Однако если внутренние параметры камер определены их конструкцией и могут считаться постоянными, то взаимное положение камер во многих практических случаях может изменяться в процессе регистрации сцены. В связи с этим возникает задача взаимного ориентирования, не предполагающая наличия тестовой сцены.
Рассмотрим снова пару камер, внутренние параметры которых известны, но неизвестны внешние параметры (матрица

Это соотношение формально выражает тот факт, что векторы




или, учитывая свойства смешанного произведения векторов,

Эквивалентные соотношения (6.21) и (6.22) являются основой для оценивания матрицы




Рассмотрим метод оценивания


Система (6.23) является однородной линейной по

Поскольку на практике в матрицу


где
Согласно МНК в качестве оценок матрицы вращения и вектора трансляции следует выбрать такие




Значительно более сложной задачей является задача оценивания матрицы




Углы



Затем в окрестности этих значений для уточнения положения минимума можно воспользоваться одним из известных методов минимизации [6.5, гл.V] (например, наискорейшего спуска, Ньютона, Маркуардта).
Наконец, получив оценки
В заключение необходимо сказать, что развитием темы взаимного ориентирования является задача самокалибровки системы камер, целью которой является оценивание как внутренних так и внешних параметров. Не останавливаясь на этой задаче подробно, отметим только, что в системе, состоящей из двух, даже одинаковых, камер, данных для самокалибровки недостаточно. Добавление третьей камеры с теми же внутренними параметрами делает самокалибровку возможной. Подробное исследование этого вопроса можно найти в [6.7].
Отметим, что задача определения взаимного положения камер может иметь и другую трактовку. Предположим, что движущаяся камера непрерывно регистрирует некоторую сцену. Тогда, анализируя последовательность изображений и решая эту задачу, можно определить характер движения камеры в пространстве.
6.6. Поиск сопряженных точек
Центральной проблемой компьютерного стереозрения является поиск сопряженных точек. Задача автоматизированного поиска сопряженных точек состоит в следующем: на одном из изображений выбрана точка


Оказывается, на первый вопрос можно дать достаточно строгий ответ.
Обратимся к соотношению (6.21). Известно [6.8, Приложение], что векторное произведение




Тогда (6.21) можно представить как

или

где

С другой стороны, любая прямая линия на плоскости может быть задана уравнением





с вектором коэффициентов

а в плоскости изображения второй камеры - прямую

с вектором коэффициентов

Это значит, что если в плоскости изображения первой камеры указана точка с вектором внутренних координат
Этот результат имеет наглядную геометрическую иллюстрацию (рис.6.6).
Рис. 6.6. Эпиполярные линии
Оптические центры камер









Практическая ценность полученного результата заключается в том, что его использование при поиске сопряженных точек позволяет существенно сократить размер зоны поиска, выполняя поиск не на всем изображении, а только вдоль эпиполярной линии, и тем самым снизить вероятность ложной идентификации фрагментов.
В отличие от рассмотренных ранее вопросов, сопоставление окрестностей сопряженных точек не поддается строгой формализации, поскольку в его основе лежит проблема идентификации по изображениям фрагментов реального трехмерного мира, которые с трудом поддаются адекватному формальному описанию. Возникающие при съемке и зависящие от ракурса проективные и яркостные искажения приводят к тому, что в изображениях одних и тех же участков сцены, снятых под разными ракурсами, могут появиться значительные отличия. Принципиально важно то, что эти отличия зависят не только от геометрии съемки, но и от геометрических и физических характеристик самой сцены. Расположение источника света по отношению к поверхности сцены влияет на распределение освещенности. Положение элементов сцены, их отражательные и рассеивающие свойства определяют количество энергии, попадающей в объективы камер, а следовательно, и локальные отличия в яркости сопряженных фрагментов изображений.
На рис.6.7 схематично показаны некоторые причины возникновения различий в изображениях. Пунктиром показаны индикатрисы излучения (рассеяния) в точках


Видно, что интенсивность излучения из точки








Величина различий зависит от разницы в ракурсах съемки. Как правило, чем больше эта разница (в частности, чем больше база), тем менее похожими становятся изображения.
Поэтому все методы отождествления окрестностей сопряженных точек в большей или меньшей степени опираются не на формальный подход, а на здравый смысл.
Рис.6.7. Проективные и яркостные искажения
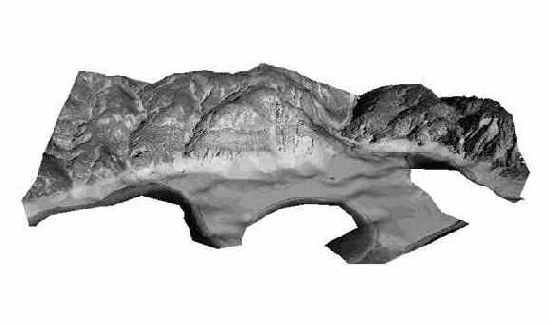
Одним из наиболее распространенных методов идентификации является корреляционный. Детальное описание корреляционного метода приведено в гл.6. При незначительных отличиях в ракурсах съемки и на достаточно гладких поверхностях от него можно ожидать хороших результатов. На рис.6.8 (а и б) приведена пара вертолетных снимков района озера Карымское (Камчатка), на которые нанесена прореженная сетка сопряженных точек, найденных корреляционным методом, а на рис.6.8.в показана поверхность, «натянутая» на трехмерные точки, координаты которых вычислены методом, изложенным в п.6.2. Следует заметить, что построение поверхности, лежащей на заданном множестве трехмерных точек, представляет собой самостоятельную нетривиальную задачу, рассмотрение которой выходит за рамки темы, обсуждаемой в этой главе.
На снимках есть области, где сопряженные точки не удалось найти. Причин этому несколько. Часть сцены, видимая в правой части правого снимка, просто не попала в поле зрения левой камеры. Кроме этого, на снимках есть участки с мало изменяющейся яркостью. На таких участках корреляционный критерий не дает хорошо выраженного максимума, поэтому здесь координаты сопряженных точек определяются с большими погрешностями. Более того, здесь велика вероятность ложных отождествлений. Пространственное представление о таких участках получить без привлечения дополнительной информации невозможно. Если размеры этих участков малы, а по косвенным признакам можно предположить, что поверхность сцены изменяется плавно, можно интерполировать трехмерную структуру участков с их границ внутрь, как это сделано для участков


Если их размеры велики, или сопряженные точки на границах не определены, восстановить трехмерную структуру участка не удается (участки


Для того, чтобы восстановить мелкую структуру сцены, необходимо, чтобы сопряженные точки лежали достаточно часто.
В приведенном примере для построения рельефа найдено более 7000 точек.
 |
 |
|
а) |
б) |
 |
|
|
в) |
|
|
Рис.6.8. Восстановление поверхности трехмерной сцены по стереопаре (приведено с любезного согласия авторов [6.9]) |
Влияние яркостных искажений можно попытаться устранить, отказавшись от сопоставления фрагментов исходных изображений, и перейдя к сопоставлению фрагментов контурных изображений, где выделены края, т.е. переходы между областями с постоянной яркостью. На таких переходах, как известно, градиент яркости имеет максимум, а лапласиан обращается в нуль. Это обстоятельство и используется для выделения краев [6.10, п.17.4]. Существенным моментом является то, что контуры на изображениях непрерывных поверхностей должны располагаться в одинаковом порядке, как это видно на рис. 6.9 (изображения точек




Кроме того, сама задача выделения краев только на первый взгляд кажется такой простой. В действительности неизбежное присутствие шумов в изображениях может привести к частичному исчезновению контуров или появлению ложных. Идея поиска сопряженных точек с помощью отождествления краев была особенно популярна у биологов и психологов, исследовавших механизмы зрения [6.11], но, как нам кажется, в таком идеальном виде практического применения не нашла.
Еще один подход к поиску сопряженных точек опирается на предварительный раздельный анализ изображений, позволяющий выделить на них некоторые характерные объекты или особенности. Так на аэроснимках городских территорий можно попытаться выделить перекрестки, отдельные дома или их фрагменты, деревья и т.п., а затем выполнить их отождествление между снимками.
По-видимому, наиболее удачных результатов можно ожидать от комбинированного использования всех этих методов и применения итеративной схемы, когда по найденным сопряженным точкам строится оценка поверхности, с учетом которой изображения подвергаются масштабной коррекции и выполняется поиск новых сопряженных точек.
Рис.6.9. Упорядочение сопряженных точек в случае непрерывных поверхностей
ВОПРОСЫ К ГЛАВЕ 6
6.1. Какой смысл имеет знак при
6.2. Какой вид примет выражение (6.3), если вектор трансляции будет задан в глобальной системе координат?
6.3. Обратимся к рис. 6.3. Какой вид будут иметь матрицы
6.4. Пусть в ситуации, изображенной на рис. 6.3, векторы


6.5. Почему в предыдущем вопросе векторы
6.6. Докажите справедливость соотношений (6.17).